创新 • 创优 • 创见
摘要:针对自动驾驶车辆视野范围强依赖于硬件配置和部署场景的局限性,设计了一个基于IPv6融合人工智能的车联网视频智能处理系统——IPv6_See_Through,利用IPv6的动态自动配置地址以及增强的组播流媒体控制技术,车辆融合多路视频后通过深度学习进行目标检测,进而增大自动驾驶汽车的驾驶感知范围、提高感知信息的准确性,解决依赖自身传感器无法解决的问题,如盲区监测、不良视线检测等。分析表明本系统可保证视频画面实时性与检测准确性,具有一定实用价值。
随着现代传感技术、数据分析、人工智能等技术与设备的飞速发展,近年来智能交通系统(ITS)的学术研究和行业发展十分突出,对提高交通服务智能化的各个方面产生了深刻的影响。在国外,谷歌、特斯拉、Mobileye自动驾驶系统,基于传感器、雷达和摄像头的各种信息输入,通过人工智能技术决策,单车自动驾驶已经在一定程度上实现。在国内,2016年9月28日,华为、奥迪、宝马、戴姆勒、沃达丰、爱立信、英特尔、诺基亚、高通宣布结成了5G汽车联盟(5GAA)。各公司将在车联网通信解决方案的开发、测试、促进销售方面展开合作,并支持标准化,加快商用化和向全球市场推广。目前已涵盖主要车企、运营商与设备商成员40多家。
然而,通过车辆自身传感器等硬件设备获得环境信息具有很大的局限性,车辆视野范围强依赖于硬件配置和部署场景。在晚上、雨雪天、雾天等恶劣天气下,在交叉路口、拐弯处等场景,雷达、摄像头存在看不见,看不清,看不准的情况。特斯拉曾发生过的一次致命事故,即为在强烈的日照条件下,自动驾驶未能识别卡车的白色车身,因此未能及时启动刹车系统所导致。针对这些场景开发性能更强的传感器,成本会高到消费者无法承受的地步。
针对上述问题,利用V2X通信(V2I,V2V,V2P)技术,能够提供远超出当前传感器感知范围的信息。本质上可以把V2X视为一个拉长拉远的“传感器”,通过和周边车辆、道路、基础设施的通讯,获取比单车能得到的更多的信息,大大增强对周围环境的感知。同时,相对于IPv4网络协议,IPv6协议更大地址空间、动态地址自动配置、加强的组播以及对流媒体控制的特性,使IPv6在车联网视频传输中提高网络整体吞吐量、支持构建动态合作式视频处理系统、改善视频传输性能与质量。更进一步的,通过深度学习的方式使车辆更加智能化的自主判断道路状况并做出应急措施。
本文设计了一个基于IPv6融合人工智能的车联网视频智能处理系统——IPv6_See_Through,增大自动驾驶汽车的驾驶感知范围、提高感知信息的准确性,解决依赖自身传感器无法解决的问题。最后给出数据分析表明系统的可靠性。
IPv6_See_Through系统设计
自动化驾驶车辆应犹如人一样具有感知和决策能力。眼睛可以看见视野范围内的各个物体即环境感知能力,耳朵可以收到其他物体传来的讯息即通讯能力,大脑则将收集到的所有信息分析处理、最终做出决策以控制行动即决策应用能力。本文将上述能力概括为ITS的五层概念模型如图1所示,用于表征自动驾驶系统的典型架构和主要组件。
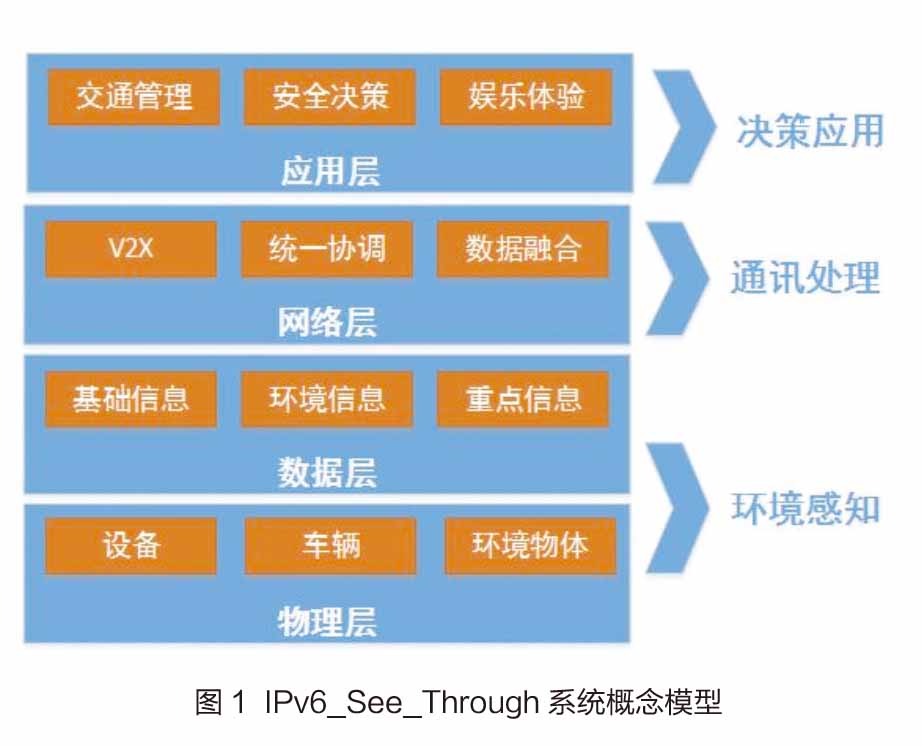
物理层:物理层封装ITS中涉及的各种物理实体,如数据采集设备(数码相机、摄像头、传感器、雷达、pad),车辆和其他公共环境物体(交通信号灯)等。各物理实体为数据生成的源头。该层通过实体间的合理配置,快速获得高质量高可靠性的数据信息。比如车辆视频的获取可通过安装固定摄像头,也可通过常用具有摄像功能的手持设备(pad、手机等)。
数据层:将物理层得到的信息划分为三类。基础信息,即时间、速度、GPS位置等,一般为文本类信息;环境信息,即道路状况、交通灯、建筑物等可看见的信息,一般为图像视频类信息;重点信息,即事故、提醒等由其他设备直接报告的信息,文本、图像、声音等信息均可。该层相关技术包括数据存储技术、数据处理技术(视频数据压缩、数据格式选择)等。视频数据在处理(融合、人工智能)之前,需保存于可靠位置,以保证与其他数据的后续融合处理。又由于数据冗余性会占用带宽且给其他通讯设备造成无效信息处理的负担,所以需要用到视频压缩等关键技术以保证可靠性和安全性。
[汽车总站网 www.chianautoms.com欢迎你]




